

Multibody Simulation Model Assembly Workflow using MATLAB
The workflow for assembling models of 3D mechanical systems involves connecting the parts in your model with joints and constraints.
- Multibody Simulation with Simscape Multibody: https://bit.ly/2TjUziZ
- Download now: Scissor Lift Model in Simscape Multibody: https://bit.ly/2EBZlk4
- Download the Simscape Multibody Contact Forces Library:
http://bit.ly/2EbEunl
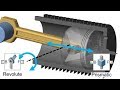
Joints are chosen based on how the parts move with respect to one another, which is often referred to as their degrees of freedom. Constraints are sometimes necessary to limit the motion of connected degrees of freedom. Simscape™ Multibody™ provides constraints that let you model systems such as engaged gears, roller coasters, and cable-driven mechanisms with pulleys. You specify how the joints are actuated using signals that specify force or a prescribed motion. The joints can be directly connected to actuator models from electric, hydraulic, and other physical domains.
- Multibody Simulation with Simscape Multibody: https://bit.ly/2TjUziZ
- Download now: Scissor Lift Model in Simscape Multibody: https://bit.ly/2EBZlk4
- Download the Simscape Multibody Contact Forces Library:
http://bit.ly/2EbEunl
Joints are chosen based on how the parts move with respect to one another, which is often referred to as their degrees of freedom. Constraints are sometimes necessary to limit the motion of connected degrees of freedom. Simscape™ Multibody™ provides constraints that let you model systems such as engaged gears, roller coasters, and cable-driven mechanisms with pulleys. You specify how the joints are actuated using signals that specify force or a prescribed motion. The joints can be directly connected to actuator models from electric, hydraulic, and other physical domains.





























No comments